
气候变化、杀虫剂使用量的增加、栖息地的丧失以及许多其他原因正在使蜜蜂、蝴蝶和其他重要授粉者的数量面临极大的风险。这也将意味着在不久的将来出现粮食..和粮食短缺的风险。
这促使技术部门和工程师们开始尝试各种方法来适当模仿授粉者的作用,从而替代或抵消自然和本地授粉物种的减少。虽然这种想法已经存在多年,美国国家公共广播电台(NPR)也报道过这种单个机器蜜蜂的设计,但这种装置的实用性往往是一个主要的症结所在,因为它遇到了成本效益、模仿能力和可扩展性等问题。不过,西弗吉尼亚大学的研究人员认为,他们的.新设计取得了突破,这是一种..授粉机器人,他们称之为 “Stickbug”。
Stickbug:专为温室设计
“Stickbug ”有别于以往的机器人授粉机,它采用了多代理设计,“将单代理系统的..性与温室中的蜂群并行化相结合”。通过这种方式,自主机器人的六只手臂各自独立运作,不仅降低了规划的复杂性,还提高了任务效率和授粉产量。
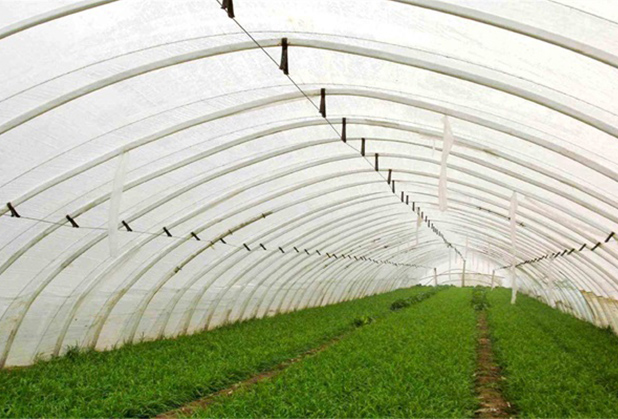
与过去的机器人授粉机相比,Stickbug的设计独特之处还在于它是专为在温室环境中工作而设计的。这是通过一个紧凑的整体工程学 Kiwi 驱动器实现的,该驱动器使机器人能够在狭窄的行间穿梭,并与一个检测模型和分类器相配合,以识别需要接触式授粉的花朵。然后使用 “毡尖末端执行器 ”开始授粉过程。
在对Stickbug原型进行测试时,研究人员将机器人分配到一株人造荆棘植物上,要求它在5分钟内为尽可能多的花朵授粉。研究报告的作者称:初步实验验证表明,Stickbug每分钟可尝试1.5次以上的授粉,成功率达 50%。
机器人授粉器的未来
虽然取得了可喜的成果,但研究人员指出,Stickbug还有很多工作要做。他们计划在花季进行后续实验,这次将使用活体植物。这是因为.初研究的一个主要限制因素是“由于授粉季节较短,无法使用真实的花朵进行实验。”
此外,研究人员还计划通过整合搜索功能和花卉负载平衡来增强操纵器的能力,并将其投入未开发的花卉密集区域进行实验。

















 当前位置:
当前位置:

 热门推荐
热门推荐





